
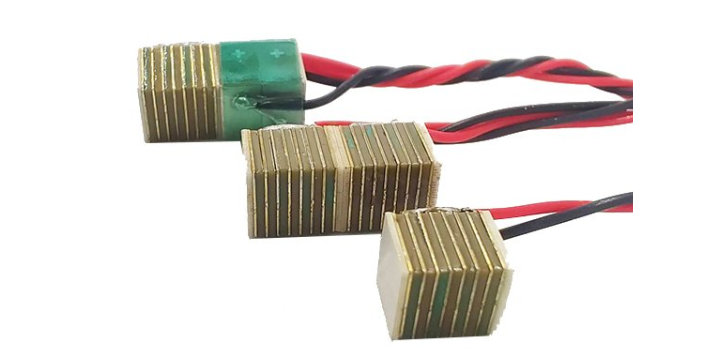
下面是一些常见的亚微米角位台的控制方式:步进电机控制:步进电机控制是一种精确控制角位台的方式。步进电机可以按照固定的步进角度旋转,通过控制脉冲信号的频率和方向来控制电机的转动。步进电机具有较高的分辨率和精度,适用于需要精确控制和定位的应用。伺服电机控制:伺服电机控制是一种*的角位台控制方式。伺服电机通过控制电机的转速和位置来实现角度的调节。通常使用编码器等*传感器来反馈电机的位置信息,并通过PID控制算法来调节电机的转速和位置,以实现闭环控制。压电陶瓷控制:压电陶瓷控制是一种特殊的角位台控制方式。电容式位置传感器应用范例纳米定位台底座固定螺丝多大尺寸?
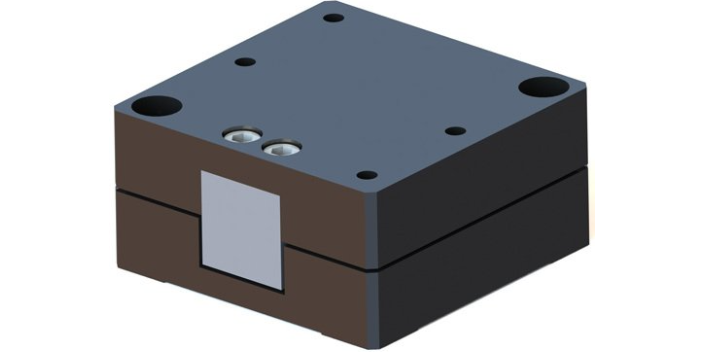
控制系统:亚微米角位台的控制系统负责接收角度传感器的信号,并根据需要对旋转平台进行精确的控制。控制系统通常由微处理器、驱动电路和反馈回路组成。微处理器接收传感器信号,并根据预设的控制算法计算出需要调整的角度变化。驱动电路根据微处理器的指令,控制电机或电磁驱动器,使旋转平台按照预定的角度变化。反馈回路用于监测旋转平台的实际角度,并将其与目标角度进行比较,以实现闭环控制。精度校准:为了确保亚微米角位台的测量和控制精度,通常需要进行精度校准。校准过程包括对角度传感器的灵敏度和非线性误差进行校准,以及对驱动系统的精度进行调整。校准可以通过比较旋转平台的实际角度和已知参考角度来完成。
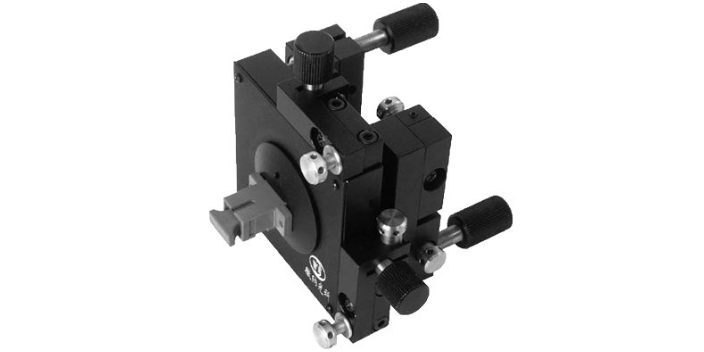
纳米调整台是一种用于微观尺度上的精密定位和调整的设备。它通常由一个平台和一系列的微调机构组成,可以实现纳米级的位置控制和调整。纳米调整台的工作原理涉及到多个方面,包括传感器、驱动机构、控制系统等。传感器:纳米调整台通常配备了*的传感器,用于实时监测平台的位置和姿态。常见的传感器包括光电编码器、激光干涉仪、压电传感器等。这些传感器可以测量平台的位移、角度和力等参数,并将其反馈给控制系统。驱动机构:纳米调整台的驱动机构用于实现平台的微调和定位。常见的驱动机构包括压电陶瓷、步进电机、电磁驱动器等。这些驱动机构可以通过精确的控制实现纳米级的位移和调整。纳米促动器在医学领域有哪些潜在应用?
以上就是关于压电纳米光学调整架报价 北京微纳光科仪器供应全部的内容,关注我们,带您了解更多相关内容。
